

Más notícias se você quiser se mudar para a Lua ou Marte: é um pouco difícil encontrar moradia. Felizmente, a NASA (como sempre) está pensando no futuro e acaba de mostrar uma estrutura robótica automontável que pode ser uma parte crucial da movimentação para fora do planeta.
Publicado hoje na Science Robotics, o artigo do Centro de Pesquisa Ames da NASA descreve a criação e o teste do que eles chamam de “metamateriais mecânicos auto-reprogramáveis”, que é uma forma altamente precisa de descrever um edifício que se constrói sozinho. O acrônimo inevitável para isso é “Sistemas de montagem digital adaptativa de missão reconfigurável automatizada” ou ARMADAS.
“Acreditamos que esse tipo de tecnologia de construção pode servir a muitas aplicações muito gerais”, disse a autora principal, Christine Gregg, ao TechCrunch. “No curto prazo, a autonomia robusta e as estruturas leves da nossa abordagem beneficiam fortemente as aplicações em ambientes austeros, como a superfície lunar ou o espaço. Isso inclui a construção de torres de comunicação e abrigos na superfície lunar, que serão necessários antes da chegada dos astronautas, bem como estruturas em órbita, como lanças e antenas.”
A ideia básica da estrutura autoconstruída reside numa sinergia inteligente entre o material de construção – estruturas cuboctaédricas que chamam de voxels – e os dois tipos de robôs que as montam.
Um tipo de robô caminha pela superfície com duas pernas, aparentemente inspirado nas moléculas de transporte de cinesina da nossa própria biologia, carregando um voxel como uma mochila. Quando isso é colocado em prática, um robô de fixação que vive na própria estrutura como uma minhoca desliza e aperta os pontos de fixação reversíveis. Nenhum deles precisa de um sistema de detecção poderoso e a forma como funcionam significa que também não é necessária alta precisão.
Você pode ver um par de andadores e uma minhoca fixadora na maioria das imagens deste post. E aqui está um andador de transporte entregando um voxel para um andador de posicionamento, com o bot de fixação escondido abaixo, esperando para passar e travar a estrutura na posição.
Dois robôs trocam um elemento estrutural enquanto um terceiro espera abaixo para fixá-lo na treliça. Créditos da imagem: NASA
O formato das peças permite que sejam fixadas em vários ângulos, mantendo uma boa resistência estrutural. Você provavelmente não gostaria de armazenar pedras no topo de uma cúpula feita com essas coisas, mas elas seriam excelentes como base para adicionar isolamento e selante para fazer uma moradia.
“Acreditamos que este tipo de construção é particularmente adequado para infraestruturas de longa duração e/ou muito grandes, incluindo habitats, instrumentação ou qualquer outra infraestrutura em órbita ou na superfície da Lua (torres de serviços públicos, instalações de aterragem de veículos)”, disse o co-autor. Kenneth Cheung. “Para nós, as estruturas e todos os sistemas robóticos são recursos que podem ser otimizados no espaço e no tempo. Parece que sempre haverá situações em que o ideal é deixar apenas a estrutura no lugar (e talvez visitá-la para inspecioná-la periodicamente com um robô), então começamos com isso.”
As próprias peças também poderiam ser construídas no local, observou Gregg:
“Os voxels podem ser feitos de diversos materiais e processos de fabricação. Eventualmente, para aplicações espaciais, gostaríamos de fazer voxels a partir de materiais que encontramos in situ na Lua ou em outros corpos planetários.”
É claro que esses vídeos dos robôs trabalhando são altamente acelerados, mas, diferentemente do trabalho em uma fábrica ou na calçada, a velocidade não é necessariamente essencial quando se trata de construir coisas no espaço ou na superfície de outro planeta.
“Nossos robôs podem trabalhar mais rápido do que o mostrado neste artigo, mas não consideramos fundamental para os objetivos principais fazê-los fazê-lo. Fundamentalmente, a maneira de fazer este sistema funcionar mais rápido é usar mais robôs”, disse Cheung. “A estratégia geral para escalabilidade (de velocidade, tamanho) é ser capaz de empurrar a complexidade da escala para algoritmos, para planejamento e programação, bem como para detectar falhas e realizar reparos.”
Os robôs desenvolvidos pelo laboratório pegaram 256 voxels e os montaram em uma estrutura de abrigo transitável durante um total de 4,2 dias de trabalho. Veja como foi o início disso (novamente, nem perto do tempo real):
Créditos da imagem: NASA
Se os tivéssemos enviado a Marte ou à Lua um ano antes da tripulação, eles poderiam construir uma dúzia dessas estruturas com o dobro do tamanho e com tempo de sobra. Ou talvez eles pudessem fixar o revestimento necessário do lado de fora e depois selá-lo – isso está um pouco além do escopo do artigo publicado hoje, mas é um próximo passo óbvio.
Embora os robôs tenham correntes que os alimentam neste ambiente de laboratório, eles estão sendo projetados tendo em mente a operação com bateria ou energia no local. O bot de fixação já funciona com bateria e os pesquisadores estão considerando maneiras de manter os caminhantes carregados entre ou mesmo durante as operações.
“Prevemos que os robôs poderiam ser recarregados de forma autônoma em usinas de energia ou até mesmo transmitir energia sem fio. Como você mencionou, a energia também poderia ser direcionada através da própria estrutura, o que pode ser útil para equipar a estrutura e também para alimentar os robôs”, disse Gregg.
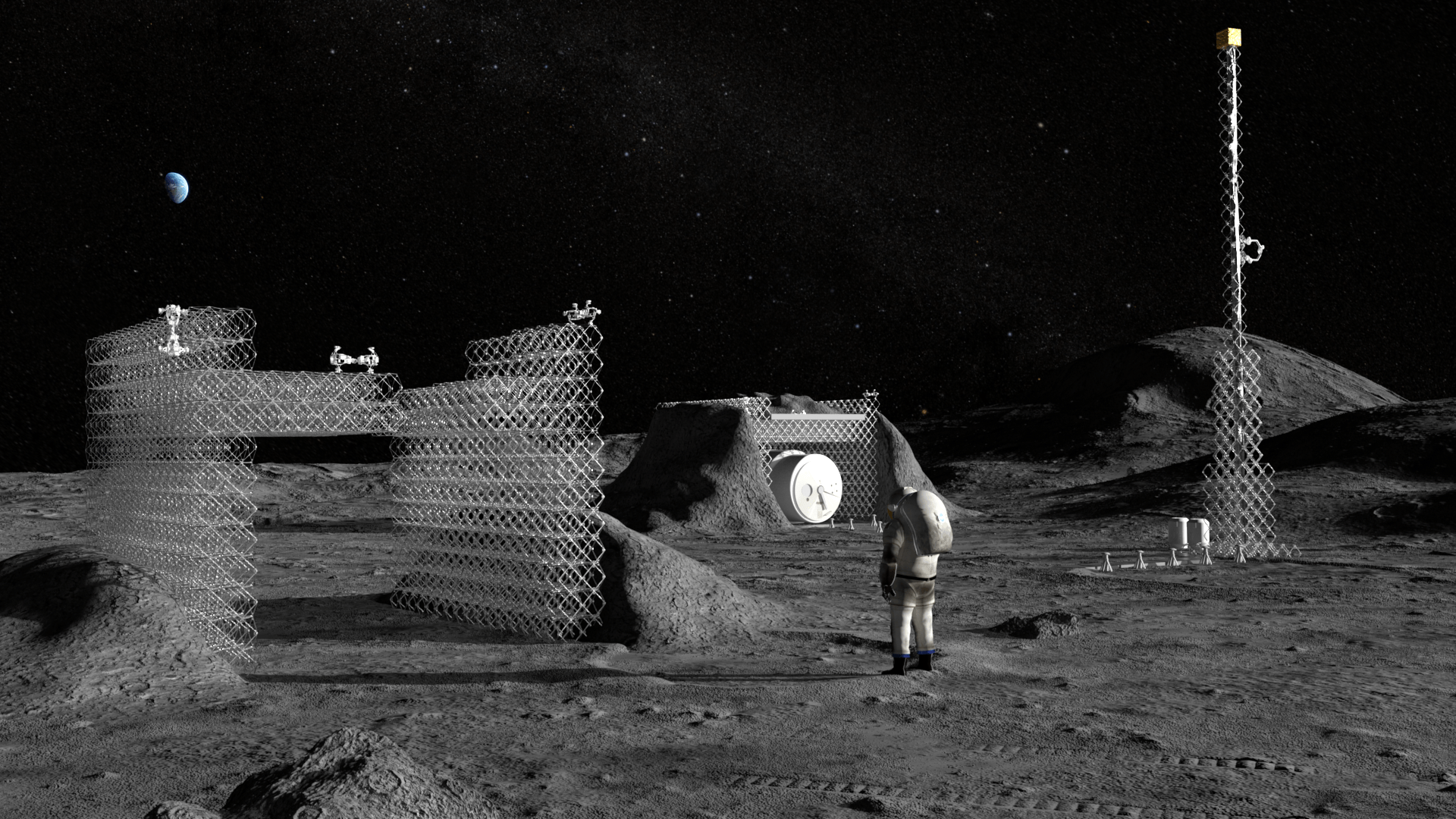
Ilustração conceitual do edifício ARMADAS sob supervisão de astronauta. Créditos da imagem: NASA
Versões do robô já voaram no espaço e trabalharam em microgravidade, então não se preocupe quanto a isso. E não há nada, em princípio, que os impeça de trabalhar em gravidades não terrestres como a da Lua. Dito isto, isto é apenas o começo – como revelar a existência de 2×4 e pregos. Há mais informações sobre o potencial e ilustrações conceituais do que eles poderiam construir, nesta postagem de notícias da NASA.
“As próximas versões de nossos robôs para ambiente de laboratório serão mais rápidas e confiáveis, com base nas lições aprendidas com as primeiras versões. Estamos muito interessados em entender como diferentes tipos de blocos de construção podem ser integrados às estruturas para fornecer equipamentos funcionais”, disse Gregg.
Da mesma forma, a investigação continuará em estruturas que empregam enxames de robôs, e não apenas um punhado; um abrigo rudimentar pode levar quatro dias para dois caminhantes, mas algo 10 vezes maior pode levar 100 vezes mais. Mas muitas mãos – especialmente as robóticas – facilitam o trabalho.
 pagará R$ 1,2 bilhão em dividendos; Veja detalhes")


{kind=link}